The Southern California Robotics Symposium (SCR) is a one-day technical symposium that aims to bring together roboticists from around Southern California. With a high density of academic institutions, research centers, and industry players, SCR is expected to have a large audience with broad expertise and interests. It will also be a showcase for established and up-and-coming robot companies as well as a recruitment opportunity for local companies and startups.
After hosting SCR 2017 and SCR 2016, we hope to continue the success of this annual conference. The symposium will once again feature an amazing line-up of speakers from academia and industry, robotics demos, and industry booths. In addition, feature poster/demo sessions will foster discussion on recent developments in robotics.
Speakers
We are excited to announce this amazing lineup for the 2019 edition of SCR!
 Aaron D. Ames
Aaron D. Ames
 Animashree Anandkumar
Animashree Anandkumar
 Thomas Bewley
Thomas Bewley
 Jorge Cortés
Jorge Cortés
 Emel Demircan
Emel Demircan
 Morteza Gharib
Morteza Gharib
 Satyandra K. Gupta
Satyandra K. Gupta
 Elliot Hawkes
Elliot Hawkes
 Solmaz S. Kia
Solmaz S. Kia
 Andreas Kolling
Andreas Kolling
 Michael Lohnert
Michael Lohnert
 Aaron Parness
Aaron Parness
 Benjamin T Pipenberg
Benjamin T Pipenberg
 Stefan Scherer
Stefan Scherer
 Ryan Sinnet
Ryan Sinnet
 Vandi Verma
Vandi Verma
Schedule
Check-in and Breakfast Sponsored by iRobot |
|
Opening RemarksMorteza Gharib: Welcome to SCR |
|
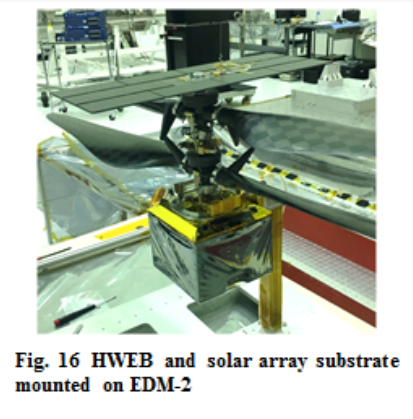
First Session of TalksAaron D. Ames: The Quest for Autonomy on Robotic SystemsEmel Demircan: Understanding Human Perception in Manipulation and Locomotion Skills Thomas Bewley: Delta-DOGS and the increasing role of efficient nonconvex optimization in the design and deployment of complex robotic systems Benjamin T Pipenberg: Design and development of the Mars Helicopter Rotor System and Airframe Michael Lohnert: Understanding the stage of your startup and working with venture capitalists |
|
Coffee Break |
|
Second Session of TalksAnimashree Anandkumar: Enabling Autonomy by Infusing Physics and Structure into Machine Learning AlgorithmsSatyandra K. Gupta: Realizing Smart Robotic Assistants through Advances in Artificial Intelligence Jorge Cortés: Resource-Aware Coordination Algorithms of Multi-Agent Systems Aaron Parness: Climbing Robots for Extreme Environments Andreas Kolling: The technologies inside the Roomba i7+ |
|
Lunch |
|
Spotlight Talks |
|
Posters, Exhibitions and Tours |
|
Third Session of TalksVandi Verma: Autonomous Target Selection and Observation for Curiosity and Mars 2020 roversRyan Sinnet: Bringing AI-Powered Robots into Food Service Solmaz S. Kia: UWB-based decentralized cooperative localization for Infrastructure-free localization in GPS-denied Environments Elliot Hawkes: Adding Soft to Robotics: From gecko-inspired wall-climbing to vine-inspired navigation Stefan Scherer: Learning Representations of Human Behavior |
|
Closing Remarks |
|
Reception |
Papers
We received many great submissions this year and accepted more contributions than we could fit in the Spotlight Session. Make sure to check out all contributions in the poster session!
Presented in the Spotlight and Poster Sessions
Presented in the Poster Session
Exhibition Booths and Sponsorship
We would like to invite your company or university to be part of the Booth Exhibition which will take place in front of Ramo Auditorium and support SCR2019.
More details at: Call for Sponsorship and Booths
Venue
1200 East California Boulevard
Pasadena CA 91125
The symposium will be held in the Ramo Auditorium at the California Institute of Technology in Pasadena, CA.
Conference Organizers
For any questions about the symposium or sponsorship opportunities, please contact scr2019@caltech.edu.
 Soon-Jo Chung
Soon-Jo Chung
 Vincenzo Capuano
Vincenzo Capuano
 Petter Nilsson
Petter Nilsson
 Ali Agha
Ali Agha
 Sorina Lupu
Sorina Lupu
 Renaud Detry
Renaud Detry
 Wolfgang Hönig
Wolfgang Hönig
Advisory Committee



List of Sponsors
SCR 2019 is made possible by these organizations and companies.